选手须知:
1.任务书共 12页,如出现任务书缺页、字迹不清等问题,请及时向裁判示意,并进行任务书的更换。
2.竞赛任务过程赛方提供电脑,并提前预装好竞赛过程中必需的开发软件和环境,竞赛过程中不提供网络。
3.竞赛任务过程需全程打开EV录屏软件,全程录屏,赛后组委会会将文件通过U盘进行备份。
4.选手在竞赛过程中利用计算机创建的所有软件程序文件必须存储到“任意磁盘”中:新建“场次号_工位号”的文件夹中,未存储到指定文件夹名称的运行记录或程序文件不作为竞赛成果予以评分。
5.任务书中只得填写竞赛相关信息,不得出现学校、姓名等与身份有关的信息或与竞赛过程无关的内容,否则成绩无效。
6.竞赛过程中严禁更改竞赛平台各单元内部电路、气路接线。由于参赛选手人为原因导致竞赛设备损坏,以致无法正常继续比赛,经裁判商议视情况进行扣分,甚至取消参赛队竞赛资格。
7.当出现参赛队伍总分相同的情况,依次对比任务6、任务5、任务4、任务3、任务2、任务1的分项得分进行排名(任务6>任务5>任务4>任务3>任务2>任务1),分项模块高分者排名靠前。如经以上对比还有同分情况,则需要对比队伍间的完成时间,比赛用时少的排名靠前。
8.在竞赛过程中裁判有最终裁定权。凡是说明中没有明确的事项由裁判组集体仲裁决议。在比赛中或比赛后有异议,需要在比赛结束后2小时内,向裁判及仲裁提出申诉需求。
竞赛场次:第 场 赛位号:第 号
一、项目设置背景
智能机械臂技术是智慧农业发展的核心驱动力之一,通过融合机器视觉、语音控制和精准操控技术,可大幅提升农产品分拣效率与智能化水平。本项目聚焦农业生产场景中的果蔬分拣环节,旨在培养学生在智能装备集成、AI算法应用和工业自动化领域的创新实践能力。
二、项目进行方式
线下
三、竞赛设备说明
大赛的竞赛平台为“智能机器人视觉系统应用平台”(以下简称“竞赛平台”),如图1所示。竞赛平台以四轴机器人单元Dobot Magician机械臂和机器视觉为核心,搭配传送带、信息入库单元和竞赛包,为完成本次工作任务,所有涉及到硬件设备都在竞赛平台内选择。任务对设备之间的通信不作限制,信息的处理不指定设备。
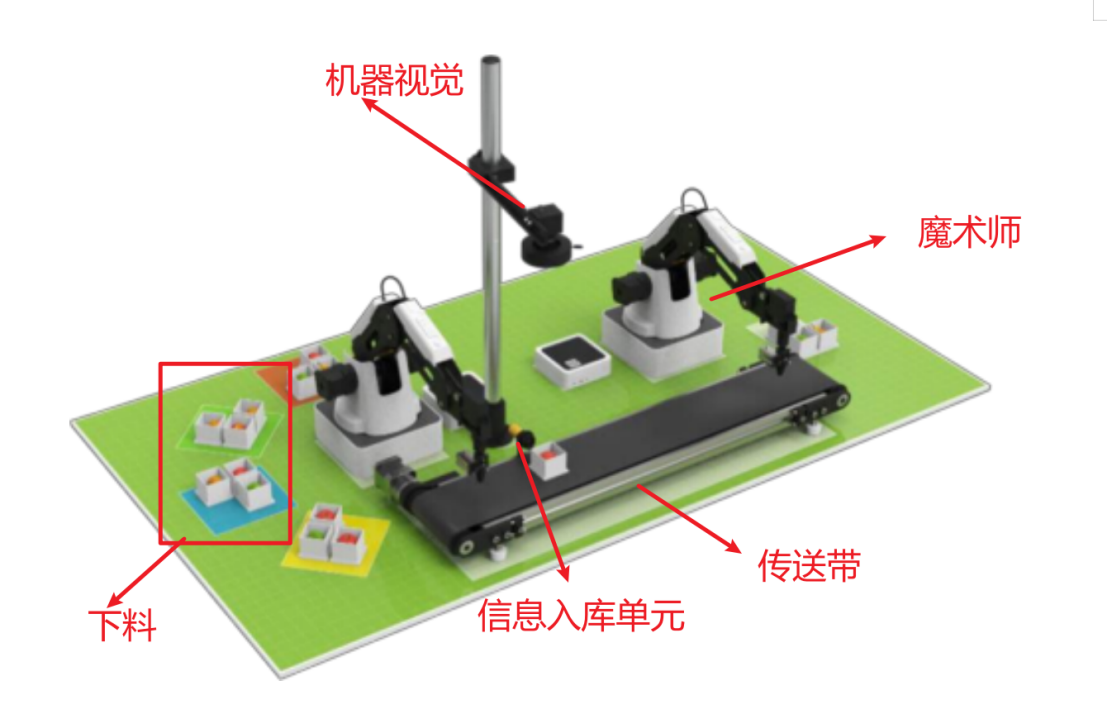
图1:竞赛平台
1. 机器人单元
机器人单元采用Dobot Magician机械臂四轴协作型机器人,可以完成X、Y、Z空间方向的运动及末端旋转,最大负载为500g,工作半径为320mm,重复定位精度±0.2mm。机器人末端配备吸盘和标定针工具,可以自行更换完成相应的工作。
2. 机器视觉单元
(1) 视觉单元
视觉单元包含了1个彩色相机,规格为500万像素;1个焦距为12mm的镜头;光源为1个白色环形光源;1个双通道光源控制器;1套辅助配件等。
(2) 标定板
本任务提供一个9点标定板,如图3所示,精度±0.01mm,其中9点标定板每个小格子的长度为25mm,选手依据检测需求选择标定方式。
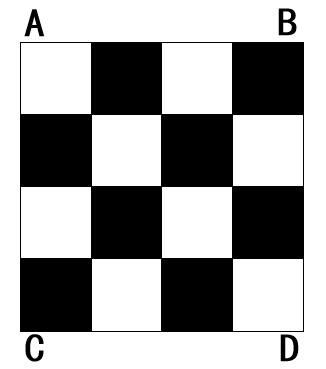
图2:9点标定板
1. 传送带单元
(1) 传送带
传送带长运行负载 500 g,有效运载长度 600 mm,最大速度 120 mm/s。如图3所示,步进电机驱动,提供防呆式插口,选手根据需求自行选择驱动方式。
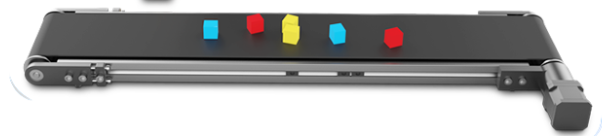
图3:传送带示意图
(1) 光电传感器
传送带包含一个光电传感器,用于检测物料是否到达检测位置。传感器为常开型,检测距离不大于30cm。如图4所示。

图4:光电传感器示意图
1. 信息入库单元
(1) 重量传感器
重量传感器可用于测量出物料的重量,如下图5所示,含去皮功能,TTL通讯方式。整体尺寸:50*63*58(mm),最大称重30kg。选手需通过此模块称出物料的重量和物料去皮后的重量。
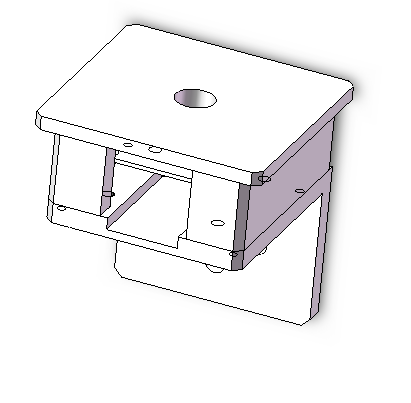
图5:重量传感器示意图
(1) 二维码传感器
二维码传感器用于扫描出物料包装箱上四周的二维码,如图6所示,usb通讯接口,测量距离40至500mm,选手需通过此模块扫描出二维码作为入库信息。
图6:二维码传感器示意图
1. 竞赛物料
比赛过程中会提供8个水果模型如下图7所示,以下简称物料,物料统一放置在包装箱内,包装箱如图8所示,每个包装箱内存放随机的水果模型,同一种类最多存在4种。包装箱四周贴有相同的4个二维码标签,每个包装箱的二维码不尽相同。
包装箱在上料区呈两行四列的排布方式整齐摆放,比赛过程中需要识别物料的类型、整体重量、水果模型重量、二维码入库信息等信息。根据识别出的结果信息进行分析,将同一种类的物料放置在对应的下料区,并且需要将每一个种类的信息进行入库,以txt的形式保存于比赛电脑中。

图7:水果模型(物料)示意图

图8:包装箱示意图(仅供参考,以比赛提供为主)
四、项目规则
参加本比赛的队伍需遵循大赛总规则。
1. 参赛设备要求
l 机械臂系统:
● 配备2台Dobot Magician机械臂(上料臂与分拣臂),需完整安装视觉相机、环形光源及传送带模块;
● 机械臂供电电压≤24V,机身活动半径≥250mm;
l 软件环境:
● 必须使用DobotStudio控制软件及多功能机器视觉软件视觉处理图像;
● 图像识别程序需基于Python开发,支持OpenCV/Pytorch框架;
l 其他要求:
● 参赛设备需通过组委会技术审查,禁止使用非标改装部件;
● 设备装饰不得遮挡传感器或影响功能实现。
2. 比赛场景综述
场地尺寸为1400 * 850mm,如图9所示,包含以下功能区域:
l 上料区:配备传送带及光电检测传感器
l 视觉采集区:安装可调环形光源的500万像素彩色工业相机
l 分拣执行区:设置红/绿/蓝/黄四色物料筐(30cm×30cm)
l 操作终端:预装Windows系统的工控机(含Python3.8及其以上python版本的环境)

图9:比赛场景示意图
1. 任务规则与得分标准
任务1:系统部署与调试
背景:精准的硬件部署是智能分拣系统运行的基础。
要求:
1. 完成视觉系统安装(相机+镜头+光源),紧固件无松动
2. 机械臂电源/通讯线规范布线
3. 通过DobotStudio实现双机械臂联动控制
4. 输出清晰度≥1080P的实时彩色图像
任务2:语音控制系统开发
背景:语音交互是人机协作的重要接口。
要求:
1. 实现"回到原点"指令响应(坐标(选手自定))
2. 支持厘米级位移指令(前/上/左向移动)
3. "开始分拣"指令触发系统联调
4. Python界面实时显示语音识别结果
5. 系统响应延迟≤5秒
任务3:信息入库系统开发
背景:信息化处理是实现自动化管理的核心
要求:
1. 根据通讯协议编写重量传感器的驱动代码
2. 实现重量传感器的去皮功能
3. 实时显示传感器的结果
4. 保存带有时间戳的识别信息结果
任务4:视觉系统开发
背景:精准识别是智能分拣的核心能力。
要求:
1. 完成9点手眼标定并生成转换文件
2. 训练果蔬识别模型(大白菜/菠萝/雪梨/胡萝卜)
3. 实时显示识别结果(类别+置信度)
4. 保存带时间戳的分拣过程图像
任务5:分拣执行
背景:高效率分拣体现系统综合性能。
要求:
1. 识别准确率≥90%(按物料种类计分)
2. 分拣至指定颜色区域(红/绿/蓝/黄)
3. 分类正确(1分/个)
4. 码放稳定(1分/个)
5. 单次分拣周期≤10秒
任务6:系统联调
背景:系统集成能力决定工程落地效果。
要求:
1. 全流程无人工干预完成分拣
2. 设备走线整齐度评分
3. 紧急停止功能有效性
2. 设备运行规则
l 视觉识别阶段禁止人工修正坐标
l 分拣过程中物料掉落需重新执行该次操作
l 允许2次系统复位机会(每次扣5分)
五、比赛流程
1. 准备阶段(20分钟)
u 场景搭建
u 设备调试
u 环境检测
2. 正式比赛(90分钟)
u 程序编写调试
3. 设备复位(20分钟)
u 设备安装要求复位摆放
u 比赛评分
u 保存选手录像及程序
六、备注说明
1. 现场提供标准物料(尺寸<5cm立方体)
2. 比赛严禁携带U盘手机等电子产品
3. 禁止使用预训练模型,需现场完成模型训练
4. 争议判罚由技术裁判组集体决议
七、联系方式
联系人:李瑾依
联系电话:13729940789(微信同号)
联系人:黎镇宇
联系电话:15531741318







